



PRN3D Perfect Y AXIS [PRN3D]
OVK01を制作するにあたって、SUSさんにてアルミフレームやナットを注文しましたが、そのついでに以前より提案しているPRN3DのY軸改良の内容(フレームを追加して前後に足を突っ張らせ、直動システムは固定されたガイドの上をベアリングが滑る形式にする!)を具現化すべく、PRN3D用のアルミフレームを併せて発注しておきました。
SUSさんに発注しておいたものは以下の2点です。
・SFF-204 SF-20・20 アルミフレーム 280mm 2本/380mm 2本
http://fa.sus.co.jp/service/catalog/SF-1011_036.pdf
・SFK-043 DブラケットクロスSSキット 12セット
http://fa.sus.co.jp/service/catalog/SF-1011_045.pdf
これを組み合わせるとこうなります。短いアルミフレームにブラケットと長いアルミフレームを乗せ、各所の端面をそろえるだけで簡単に位置調整ができます。

フレームどうしの連結にDブラケットクロスSSキット(末尾にキットとつくとネジと専用ナットが付いてきます)というブラケットを使用していますが、これが結構優れ物で、簡単に平面交差させたフレームの直角が出るとともにがっちり固定してくれます。
この状態のアルミフレームに、中古ですが格安で手に入れた9mm幅レールのリニアガイドと、それに合わせて作ったアルミ製のガイド連結パーツとヒーテッドベッド固定用のプリントパーツ、ベルト駆動用のパーツを追加すると以下の様になりました。

奥側のベルトのプーリーにはNTNの626ZZ(軸φ6mm、幅6mm、直径19mm)を使用しています。PRN3DのY軸に使われている624ZZ(軸φ4mm、幅5mm、直径13mm)に比べて幅がちゃんと6mmあるのベルトがしっかり架けられます。
いつもなら制作したプリントパーツの情報をThingiverseに公開するところですが、幾分中古のリニアガイドを使用しており、再現性に乏しいので今回は割愛します。皆様におかれましてはリニアガイドの替わりに、長さ380mm x φ8mmのリニアシャフトとLM8UUベアリングで直動システムを構成して、その上にアルミ板やMDF板で制作したヒーテッドベッドプレートを乗せる構成をおすすめします。構造はGenkeiさんのATOMを参考にされるとよろしいかと思われます。
~2015年7月1日追記~
φ8mmのリニアシャフトを勧める理由は、ステンレスシャフトで400mm近い長さになってくると純正と同じφ6mmのリニアシャフトではヒートベッドの重量が加わった時にタワミによるシャフトの下がり量が計算したら無視できない値になるからです。φ8mmではほぼ、無視できる値になります。LM6UUベアリングが勿体ないですが、セット付属のLM6UUはあまり精度が良いものとは思えませんし、この際ですのでサイズアップするついでに国産品のLM8UUに交換しましょう!
また、改造時に注意した点は以下の通りです。
1.ヒートベッドを固定するネジとリニアベアリングを極力近付け、振動による影響を少なくする。
2.リニアベアリングはなるべくヒートベッドの4隅に配置する。
3.駆動力の作用点を中心に持ってくる。ベルトを直線にする。
4.ベルトを円状に架ける(純正の架け方に比べ方向転換時のバックラッシュを少なくなる)
5.駆動力を伝える梁構造の重量を極力軽くし、Y軸の慣性重量を下げる。今回はアルミ角棒で制作した。
6.ベルトのテンション調整ができる機構を備える。
7.もちろんベルトはゲイツのGT2。設計時に長さを計算しているので、ベルトの歯数を指定して円状の状態のままセットに組み込んである。
8.フレームとゴム足を前後に追加してY軸の慣性で筺体が前後に揺れない様にする。
~追記終わり~
上記のフレームにモーターを設置し、各パーツの位置を固定すると以下のような状態になります。手前と奥のアルミフレームには以前にも追加した汎用のゴム足を追加して、Y軸を地面に突っ張らせます。
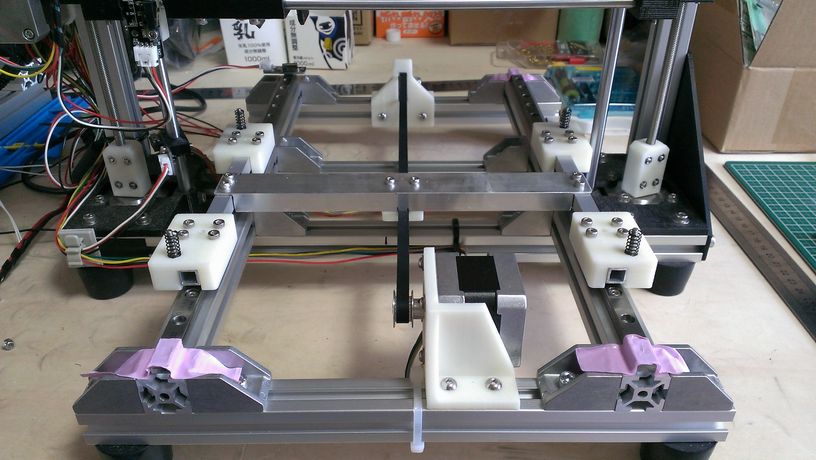
これにヒーテッドベッドを横向きで搭載するとこんな感じにします。今回の改良の肝はココです。ヒーテッドベッドを横向きに設置する事によって、直動システムの長さを短くすることができ、且つ直動システムの真上に熱源がこなくなるので、直動システムとヒートベッドを連結するパーツにプリントパーツが使える様になっています。

手前左手に放置してあるY軸のリミットスイッチはこの後奥側フレームに両面テープで仮取り付けをしました。
それと、上記の設置位置ではモーターは駆動向きが純正状態に対して反対になりますので、制御基板からモーターに繋がっている4線の配線のうち、片側ペアの左右入れ替えて動作を反転させました。
上記の状態でヒートベッドのレべリング調整をしてみましたが、各パーツの剛性が上がったおかげで苦労することなくサクっとおわりました。
Pronterfaceでの動作確認はできましたので、
「足は付いていない」
「あんなの飾りです。偉い人にはそれがわからんのですよ」
とは言わせない結果が出ることを期待して次回はいよいよテスト印刷してみます。( ´ ▽ ` )ノ
Y軸改良いいですね!
私はまだそこまで到達できていないので、小物パーツをセコセコと作成して遊んでます(^^
ハイスピードカメラによる振動解析もおこなったので、自分自身のやり方で答えを出してみようと思います(笑)
by まず分解。 (2014-05-26 01:22)
おぉ、これはすごい。 参考にすべき点が山盛りですね。
HBが横向きに収まると言うの発想が私的には大収穫です。
可動側の重量増が気になっていたので一気に軽量化できるめどが立ちそうです。
by 羽等 (2014-05-27 15:27)
公式でSTLの更新があったようですね。 Y軸関係の更新が・・・。
よく見ると、コントローラーver1.1 とか・・・。
by 羽等 (2014-05-27 23:07)
ハイスピードカメラの映像をみましたが、改めて上下に振動していることが確認できました。ほんと凄く揺れまくってますよねぇ、、、
コントローラV1.1は電源入力の保護回路の変更と、電源入力端子の変更(誤挿入防止)、5Vパスコンの配置変更とモータードライバの12V系に0.1uのパスコン追加したっぽいですね。5Vのパスコンは3端子レギュレータの出力側にあった20uを2個(10u)に分割して、USB-232Cドライバの電源を強化してるっぽいです。STLの変更はリミットスイッチの変更に対応しただけで直動メカの部分は何ら手を入れてないっぽいですね。残念です。そこら辺はあくまでユーザー任せなのでしょう^^;
by たぬきち (2014-05-27 23:33)