



ROBO3D 初出力 [ROBO3D]
ROBO3Dにて初出力してみました。
PRN3Dで現状使っているABSフィラメントを差し替えて、ヒートベッドとノズルの距離を調整した後※、いきなりABSで25mm箱型キューブを出力してみました。(※:ヒートベッドとノズルの距離を調整する際はヒートベッドを印刷時の設定温度まで温めてから行ってください。ROBO3Dのヒートベッドはペイントされた厚いガラス板の裏にヒーターが貼ってあるだけという簡素な造りで且つ、ガラス板全体ではなく中央の枠で囲まれた印刷領域の部分だけ加熱されるため、周辺の非加熱部分と温度差が生じることにより膨張の差が生じて反ります。ちなみにヒートベッドの温度は110℃までちゃんと上がりますよ~)

設定はほぼPRN3Dそのままで3Mの343マスキングテープを張り付けてラフトは15mm/s、その他は50mm/sの設定で印刷しています。積層厚は0.2mmです。
ところがどっこいご覧の有様でした。
フィラメントの供給不足でスッカスカです。
フィラメントの供給不足については以下の原因が考えられます。
(1)フロントエンドへ設定するパラメータが間違っている
(2)ドライブギアのテンション不足
(3)ホットエンド内部での詰まり
下面の方は上手く印刷できていることから(1)ではなさそうです。(2)についてもフィラメントが半分近くまで削られて細くなることがあることからなさそうです。試しにホブドボルトをフリーにして手でフィラメントを押し込んでみましたが、フィラメントが折れ曲がりそうなぐらいに力を込めるとノズルの先からちょろちょろと融けたフィラメントが出てくる状態でした。本来なら指でつまんで軽く押し込めばニュルニュル出てくるぐらいが理想です。
ノズルを分解して様子をみてみますと、フィラメントがノズル部ではなく、PEEKバレル(左側の黒い筒)の中ですでに融けて広がっている事が判明しました。上まで熱が上がり過ぎているようです。(ちなみに私のROBO3DのホットエンドはJ-HEADのMk-Vの様です。他の方のブログを見るとMk-Iの方もおられます)

原因は出荷時にヘッドに巻かれたカプトンテープだと思われます。写真を撮り忘れましたが、不用意にヘッド部分からPEEKバレルの上の方までぐるぐると全体に密着して巻かれていました。これでは熱が無駄に籠ってしまい、フィラメントの溶融開始位置が上に上がります。ノズル内のフィラメントの溶融量は少なければ少ないほどホブドボルトでフィラメントを押しだす際に必要な力は小さくなるはずです。
さらに、ノズル自体が、ヒートブロックとバレルとを含めてアルミの削り出しの一体成型である事も熱が上に上がりやすい原因となっていると考えられます。
また、ヘッドの温度を計測する熱電対がヒーターのすぐそばの小さな穴の中に設置されていますが、この場合だと、ノズルの先端付近の温度は熱電対で計測された温度より低くなり、適切な溶融温度が保たれていない可能性があります。(もっとも設定温度を高めにすれば良いわけですが、ROBO3Dの設定上限はデフォルトで235℃なのでABSフィラメントの場合は設定値幅が限られます)
以上のことを踏まえ、カプトンテープの使用料は最小限に抑え、熱電対はノズルの先端横、ヒーターに対して対極の位置に配置するようにしました。

この後、ノズルヒーターの温度を220℃に設定してみてフィラメントを手で押し込んだところスルスルと出てくるようになりました。
上記の手をいれて再度キューブを印刷してみた結果がこちらです。
、、、
形にはなりましたが、Zネジの偏芯が原因のウォブリングしまくりorz
ウォブリングの主な原因はカプラーと昇降ネジの接続方法にあると思われます。
昇降ネジにPTFEテープを巻いて径を稼いでカプラーでクリップしていますが、明らかにセンターで挟み込めていないので、ネジが回った時に偏芯します。
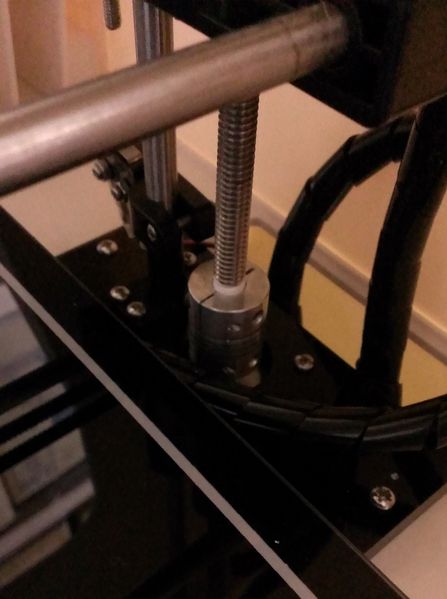
偏芯していると、回転時にネジ自体のバランスが崩れ、そこにフレキシブルカップリングの自由度が加わり、たこ踊りの様に左右に揺られます。ああ、結局のところモーターの反対側にスタビライザーが要るのね ;ω;
Y軸の直動部品として使われている低価格のスライドレール(机の引き出しとかに使われるスチール製のアレです)もこれは果たしてありなのか?というぐらいぐらぐらですし、、、、あれれ?どっかで経験したことのある様な話が続いてるな~^^;
ROBO3Dは買っていませんが・・・なかなかこちらも修正点がたくさんありそうで。
ウチのPRN3Dでの話ですが、Z軸は最終的に上下にスタビライザー装備で、自作したオルダムカップリングでモーターと接続しちゃいました。
by 羽等 (2014-04-24 20:07)
修正点が多すぎてどこから手を付けて良いものやら、、、、
ROBO3Dのフォーラムみてもアメリカ人は
「ハハハ、調子が悪いなら自分で直すぜ~」
みたいなノリでどんどん改造していて面白いです。
オルダムタイプのカップリングを自作ですかー。羨ましい。
私もカップリングは5mmx6mmのフレキシブルタイプをebay.comで入手したのですが、ネジが切ってあると軸径が小さくなるため上手く中心でクランプできなかったので結局使用をあきらめた経緯があります。5mmx5mmのを買ってネジ側をタップ切れば良かったと少し後悔してます^^;
今使ってるmonotaroで買ったステンレス全ネジもわずかながらブレがあるのでいずれ軸端がちゃんと段加工された台形ねじが滑りネジに交換するつもりです。
by たぬきち (2014-04-24 21:57)